저번포스팅은 window 10 home환경에서 ROS를 설치후 사용하는거라면 이번에는 WSL(리눅스용 윈도우 하위 시스템(Windows Subsystem for Linux, WSL)환경에서 ROS를 사용할수있게 해보겠습니다 멀티 부팅이 귀찮을 때 굉장히 편합니다
출처: wiki.ros.org/melodic/Installation/Ubuntu 를통해 진행합니다
전체적인 순서는 Ubuntu18.04 LTS 설치>환경설정>ROS 설치>로스패키지설치>환경설정>Xserver설치>테스트입니다
Microsoft Store 에서 Ubuntu 18.04 LTS 설치
다운받고실행하시면됩니다
Ubunt를 설치하시고 켜보면 환경설정이 안되있기에 에러가 출력됩니다
Ubunt를 설치하시고 켜보면 환경설정이 안되있기에 에러가 출력됩니다

윈도우 설정> 검색에 windows 기능 켜기/끄기로 들어갑니다
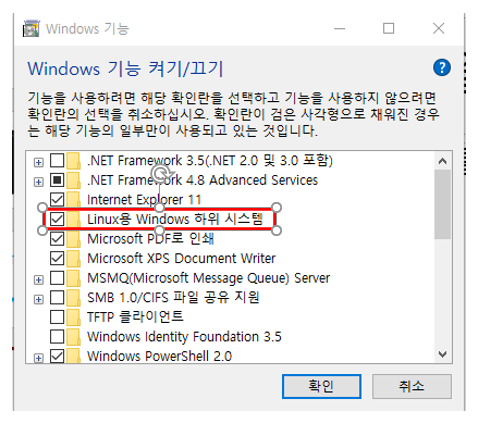

Linux용 windows하위 시스템을 체크하고 확인후 다시 설정으로 들어갑니다 체크하고 적용하면 한번다시 부팅하셔야합니다
다시 Ubuntu18.04 LTS를 켜시면 정상적으로 ubuntu가 설치됩니다
이름과 비번을 적고 기다리시면 인스톨이 끝났다고 나옵니다
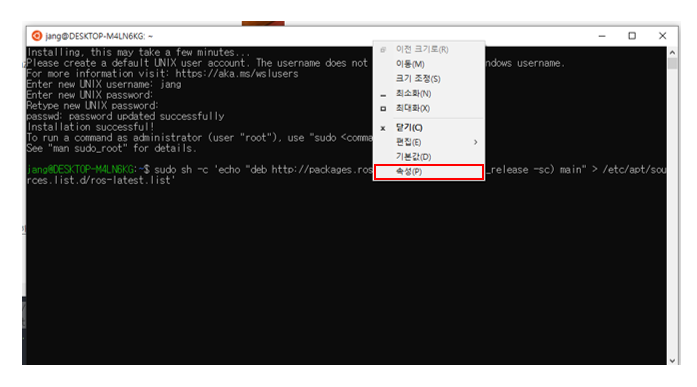
ubuntu 창에 오른쪽클릭후 속성을 들어가셔서
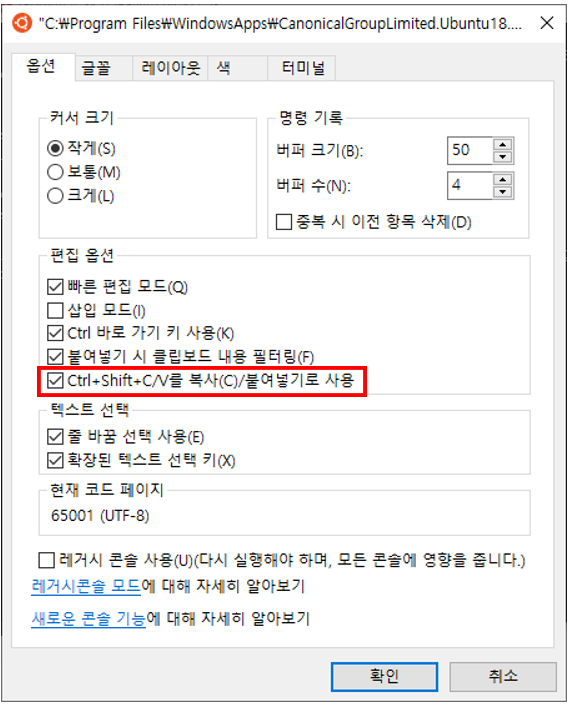
Ctrl+Shift+c/v를 복사붙여넣기로 사용을 체크하고 확인을 눌러줍니다 우분투 창에 붙여넣기하실땐Ctrl+Shift+v로 붙여넣어야합니다
패지키와 키 업데이트
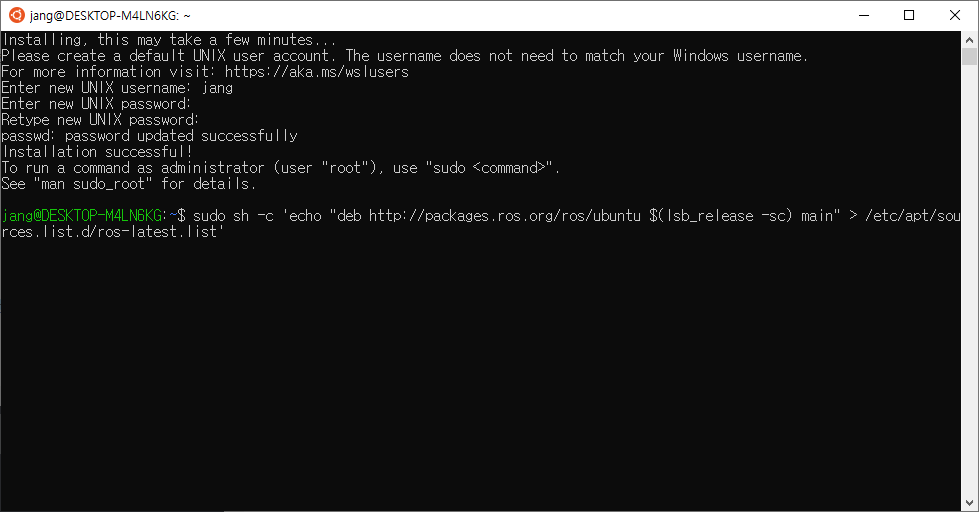
packages.ros.org의 소프트웨어를 수락하도록 컴퓨터를 설정합니다.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'

키설정
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

이런창이뜨면 꼭 액세스허용을 해주셔야합니다

업데이트 통해 패키지를 최신으로 만듭니다
sudo apt update
ROS설치
이번 글에서는 데스크톱 전체설치를 할겁니다
설치형태는 총4가지가있습니다 자세한사항은 wiki.ros.org/melodic/Installation/Ubuntu 를 확인해주세요
데스크톱 전체 설치 : (권장) : ROS, rqt , rviz , 로봇 일반 라이브러리, 2D / 3D 시뮬레이터 및 2D / 3D 인식
데스크탑 설치 : ROS, rqt , rviz 및 로봇 일반 라이브러리
ROS-Base : (Bare Bones) ROS 패키지, 빌드 및 통신 라이브러리. GUI 도구가 없습니다.
개별 패키지 : 특정 ROS 패키지를 설치할 수도 있습니다 (밑줄을 패키지 이름의 대시로 대체)

sudo apt install ros-melodic-desktop-full풀 데스크톱으로 설치합니다 시간이 좀걸립니다
파이썬패키지매니져 설치
sudo apt-get install python-pip

pip 으로 rosdep의 패키지 설치(최신버전)
sudo pip install -U rosdep

rosdep 최기화
sudo rosdep init
rosdep update
만약
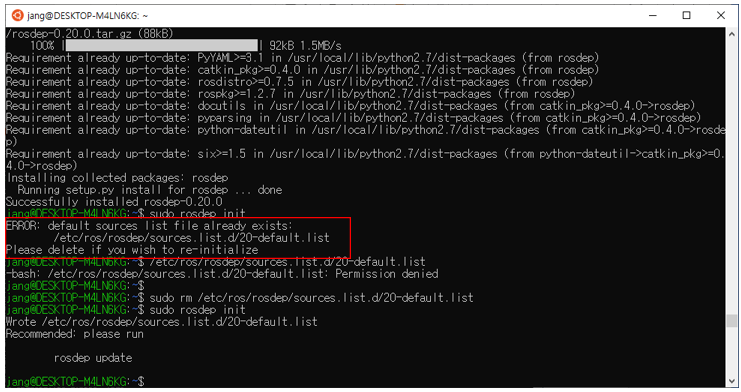
해당 에러가나오면 sudo rm /etc/ros/rosdep/sources.list.d/20-default.list 후 다시 하면됩니다
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
sudo rosdep init
rosdep update
환경설정
rosdep 업데이트까지 끝났으면 아래 환경 추가를 해주면됩니다
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
Dependencies for building packages
빌드용 종속성 설치
ros의 작업영역을 만들고 관리하려면 받아야하는 패키지입니다
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
빌드테스트
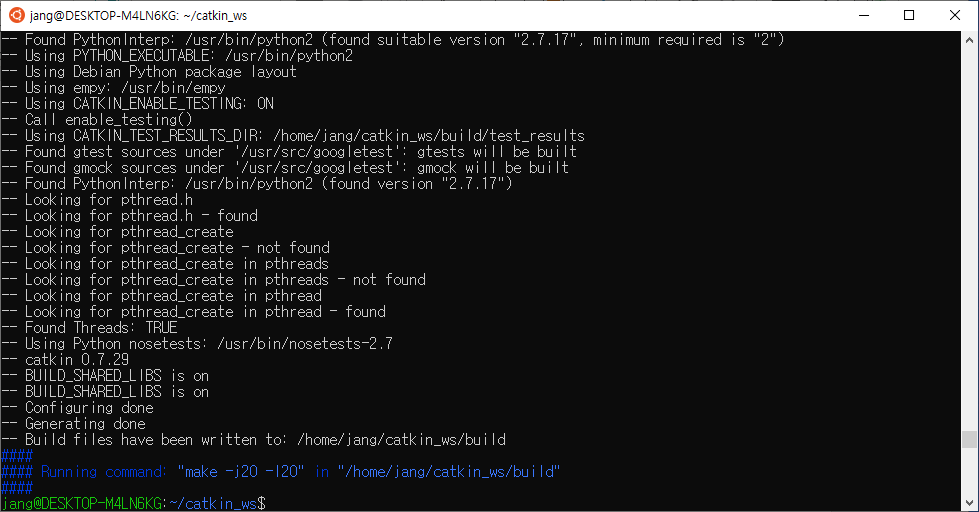
mkdir -p catkin_ws/src
cd catkin_ws/
catkin_make
ROSCORE 테스트
roscore
XSEVER 설치
XSERVER 는 Rviz Gazebo등 gui의 툴을 사용하기위해 반드시필요합니다
github.com/ros-visualization/rviz/issues/1438
stackoverflow.com/questions/61110603/how-to-set-up-working-x11-forwarding-on-wsl2
를 참고하여 작성했습니다
sourceforge.net/projects/xming/
Xming X Server for Windows
Download Xming X Server for Windows for free. X Window System Server for Windows. Xming is the leading X Window System Server for Microsoft Windows 8/7/Vista/XP (+ server 2012/2008/2003). It is fully featured, small and fast, simple to install and because
sourceforge.net

다운하고 실행해서 설치합니다
설치가끝나면 XLaunch를 실행해서 설정합시다

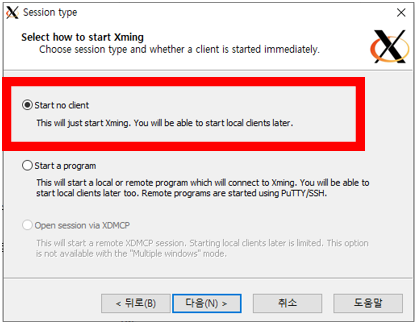
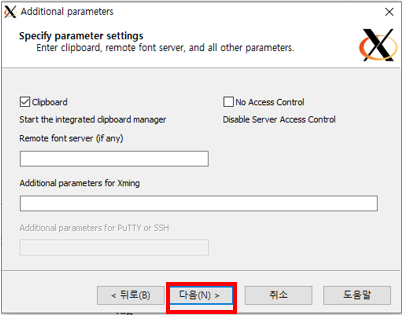
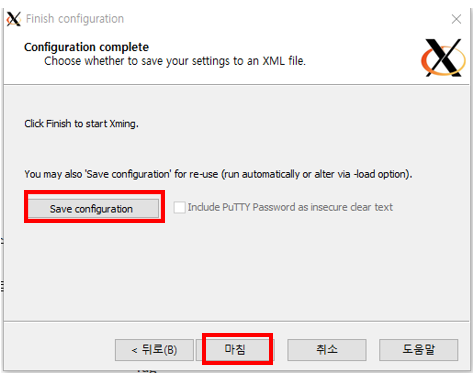
설정을 저장하셔서써도되고 그냥써도됩니다
다끝났으면 다시 ubuntu 창으로 가서
id 생성
sudo systemd-machine-id-setup
sudo dbus-uuidgen --ensure후 아이디 확인
cat /etc/machine-id
x윈도우 구성요소 설치
sudo apt-get install x11-apps xfonts-base xfonts-100dpi xfonts-75dpi xfonts-cyrillic
환경설정
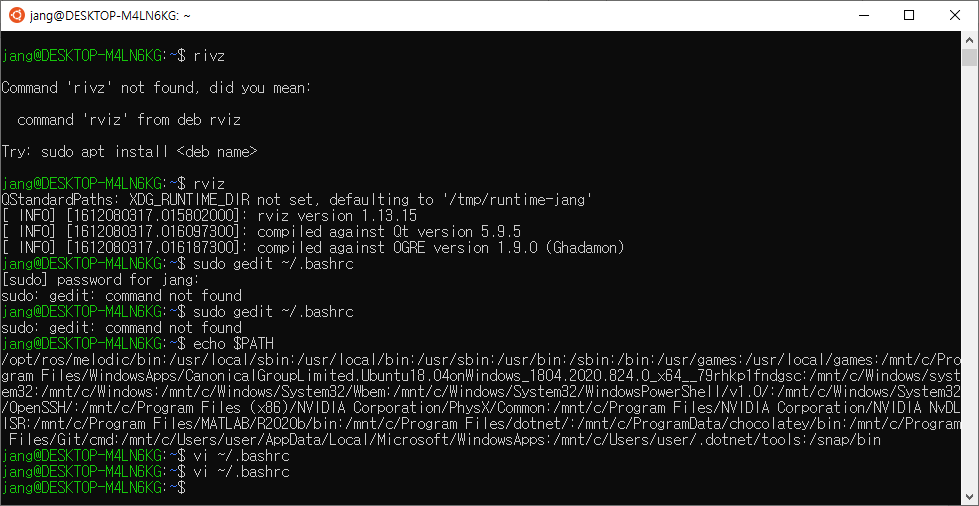
vi ~/.bashrc를 입력하여 환경설정을 해봅시다
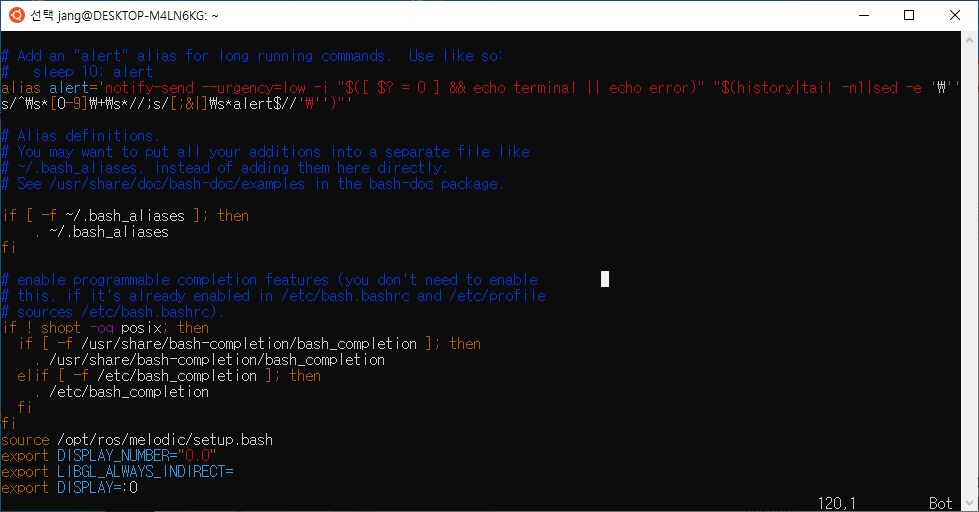
export DISPLAY_NUMBER="0.0"
export LIBGL_ALWAYS_INDIRECT=
export DISPLAY=:0
i키를 누르면 입력이 가능하고 입력이다되면 esc를 누르면 입력모드가 해제됩니다
입력모드가 해제된후 :wq를 치고 엔터하면 저장후 닫기가됩니다 위코드를 복사해서 붙여넣기하고 저장합니다
source ~/.bashrc를통해 적용합니다
테스트
rviz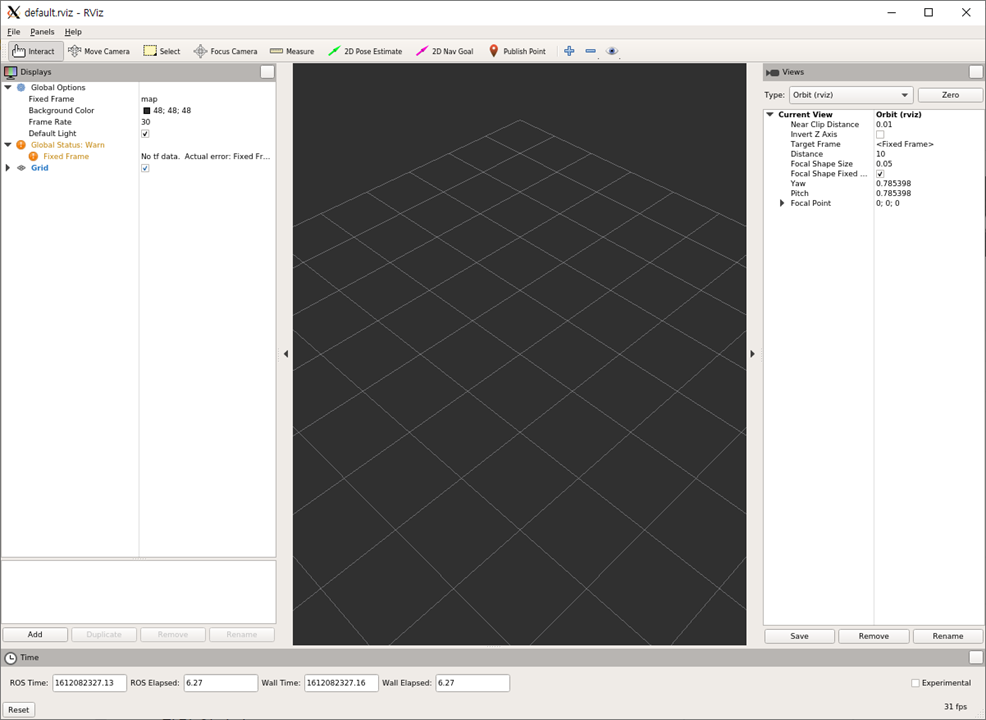
'공학 > ROS' 카테고리의 다른 글
| ROS-기초 (node,rosmaster) (0) | 2022.08.06 |
|---|---|
| ROS 개념 정리 [파일 시스템] (0) | 2022.04.29 |
| ROS-WINDOW 10 환경에서 설치하기 (6) | 2021.01.31 |